信息科技实验板:扩展板
大约 5 分钟约 1442 字
信息科技实验板:扩展板
简介
信息科技实验板:扩展板V1.0,是为了用户在使用 信息科技实验板:开发板时可以快速制作机器人、开源硬件等项目而设计的扩展板,配套 信息科技实验板:开发板使用。
直流电机接口2个,舵机输出接口9个,2个通口支持数字输出、模拟输入、数字输入,IIC口1个,串口2个,充电口1个,充电管理芯片。产品接口均采用6芯水晶座,方便多次插拔,同时可以兼容积木式教学机器人中的配件,如减速电机、伺服电机、传感器及ABS积木构件,并引出 信息科技实验板:开发板全部引脚,支持Mu、Mixly、Thonny、人工智能编程平台v1.0(python)图形兼代码编程软件。
特性1:电机、舵机的功率驱动;
特性2:通用端口(通口P0、P1)设计包含数字输出、数字输入、PWM输出模拟输入、模拟输出。
参数说明
| 机器人开源硬件配件- 信息科技实验板:扩展板V1.0技术指标 | ||
|---|---|---|
 | 产品编码:N-M-1111 | 供电电压: 3.7V |
| 通讯接口:串口/IIC | 重量:35g | |
| 孔距:70x40mm | 孔径:Ф3 | |
| 外观尺寸:80X50X17.5mm | ||
| 接口:直流电机接口2个,舵机输出接口9个,2个通口支持数字输出、模拟输入、数字输入,IIC口1个,串口2个,充电口1个,充电管理芯片 | ||
| 配件: Type-C数据线1根 | ||
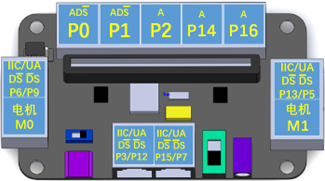
布局和连接
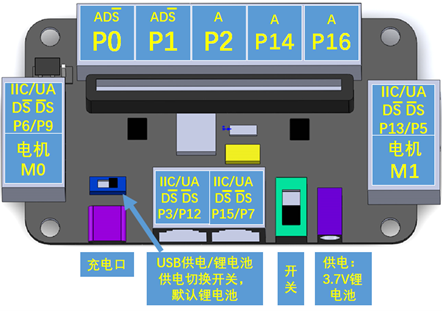
端口上方字母标号: A模拟 D数字 S舵机 IIC通讯 UA串口若字母上方带横线,表示该功能不可直接使用,需要转接线。
其他功能如下表
| 类型 | 接口 | 控制说明 |
|---|---|---|
| 接口说明 | 通口P0、P1 | 数字输出、数字输入、PWM输出、模拟输入、模拟输出; |
| P2、P14、P15、P16 | 模拟输入、数字输入 | |
| P3、P4、P5、P6、P7、P8、P9、P10、P11、P12、P13 | 数字输入、数字输出、舵机控制等,其中P4、P8、P10、P11已固定为电机M0、M1引脚,不作其他用途; | |
| P0、P1、P8、P12、P13 | 触摸功能(TouchPad) | |
| M0、M1 | 可独立控制2路直流电机 | |
| IIC、UA | 通信接口 | |
| 其他 | micro USB充电口1个 | 通信接口支持电脑、5V标准适配器充电 |
| 锂电池扩展接口 | 含3.7V外置锂电池锂电池 |
具体使用说明如:
P0端口上方标号ADS:表示P0端口支持模拟输入(A)、数字输入(D)、舵机控制S,但由于S上方有一横线,表示该功能使用时,需要加转换线。其他端口使用方法相同。
若要用通信功能时,则需要使用IIC或串口(UA)功能,此时该端口的引脚在使用时,需要初始化成对应的功能,如:用P13/P5、P6/P9作为串口均可。
以下表格中的功能为不需要转接线,各端口可直接用的功能,同时与软件端口设置对应:
| 类型 | 传感器类型控制说明 | 端口 |
|---|---|---|
| 接口说明 | 数字输入 | P0、P1、P3、P6、P13 |
| 数字输出 | P0、P1、P3、P6、P13 | |
| 模拟输入 | P0、P1、P2、P14、P15、P16 | |
| 舵机控制 | P5、P7、P9、P12 | |
| 串口UART1、UART2 | P13/P5、P6/P9、P3/P12 | |
| IIC通信 | P3/P12 |
水晶座接口引脚
以上功能为标准接口所含功能, 信息科技实验板:引脚均内置于水晶座内,引脚具体对应关系如下图所示:
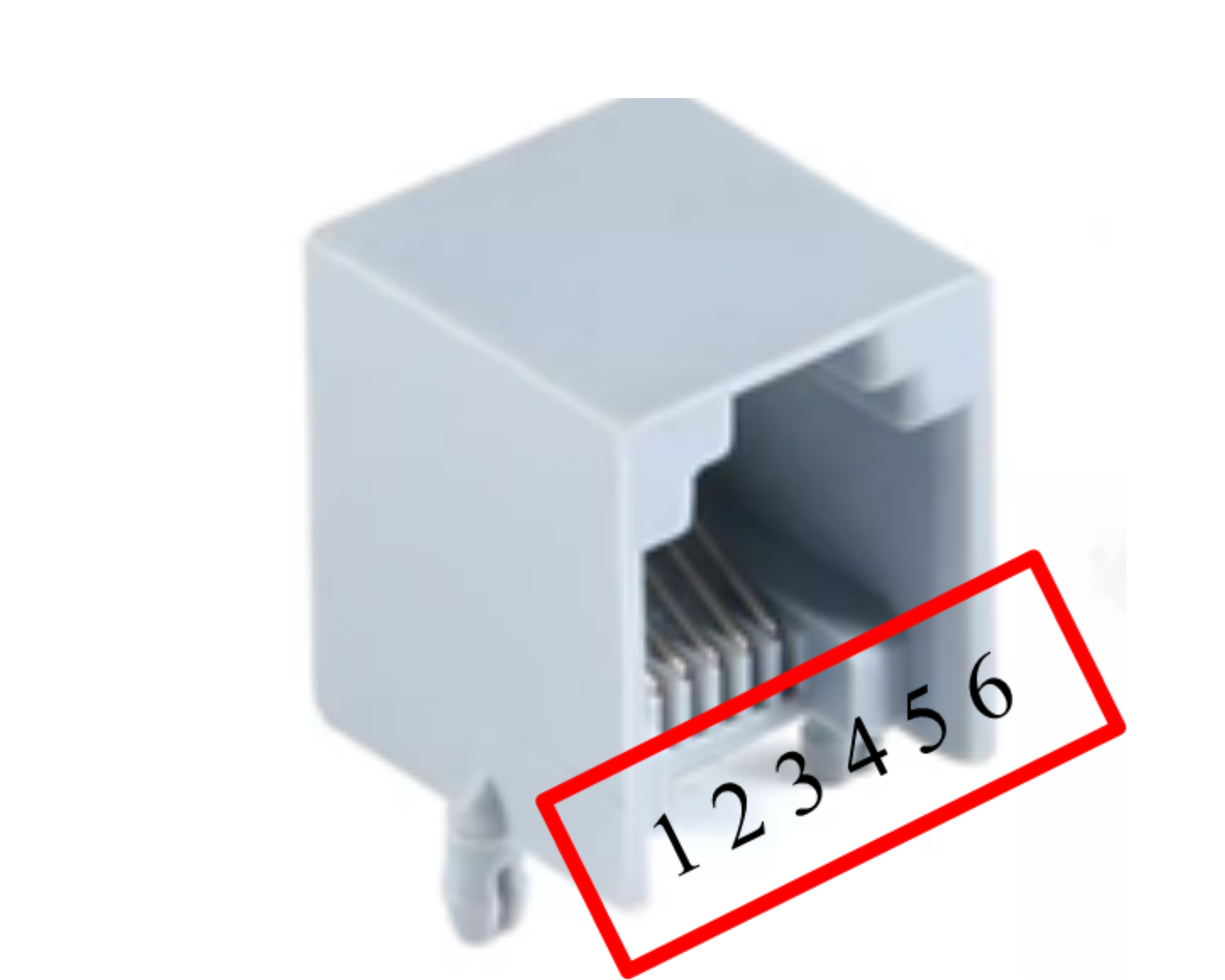 |  |
6芯水晶线从左到右说明:
| 说明 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|
| NC/SCL | NC/SDA | VCC | GND | 端口1 | 端口2 |
P0端口6芯座说明:
| P0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|
| NC | NC | VCC | GND | NC | P0 |
P3/P12端口6芯接口说明:
| P3/P12 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|
| SCL | SDA | VCC | GND | P3 | P12 |
P6/P9端口6芯接口说明:
| P3/P12 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|
| SCL | SDA | VCC | GND | P6 | P9 |