伺服电机
大约 2 分钟约 552 字
伺服电机
传感器介绍
伺服电机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前,在遥控航空、航天模型控制动作,改变方向的重要组成,不同类型的遥控模型所需的伺服电机种类也随之不同。
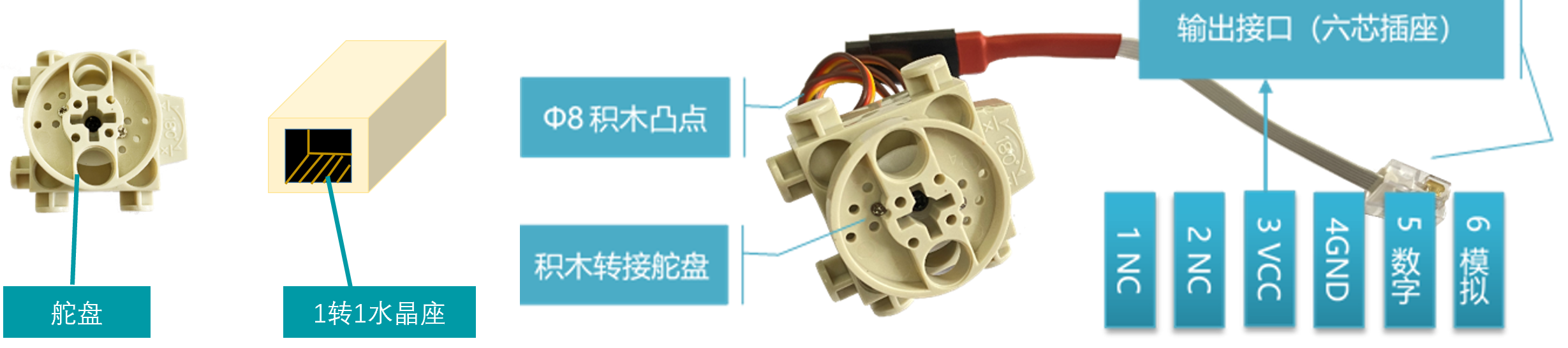 |
| 工作电压 | 5V |
|---|---|
| 类型 | 执行器 |
| 接口类型 | RJ12 |
| 外观尺寸 | 60*60*40mm |
| 适配类型 | 主板/扩展板 |
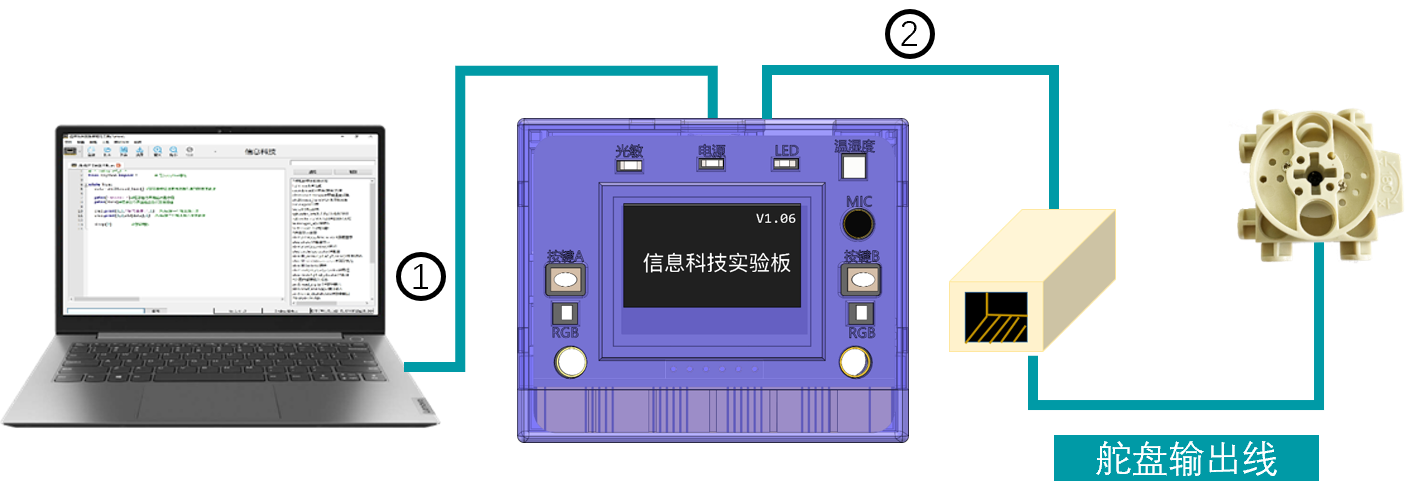
主板连接方式
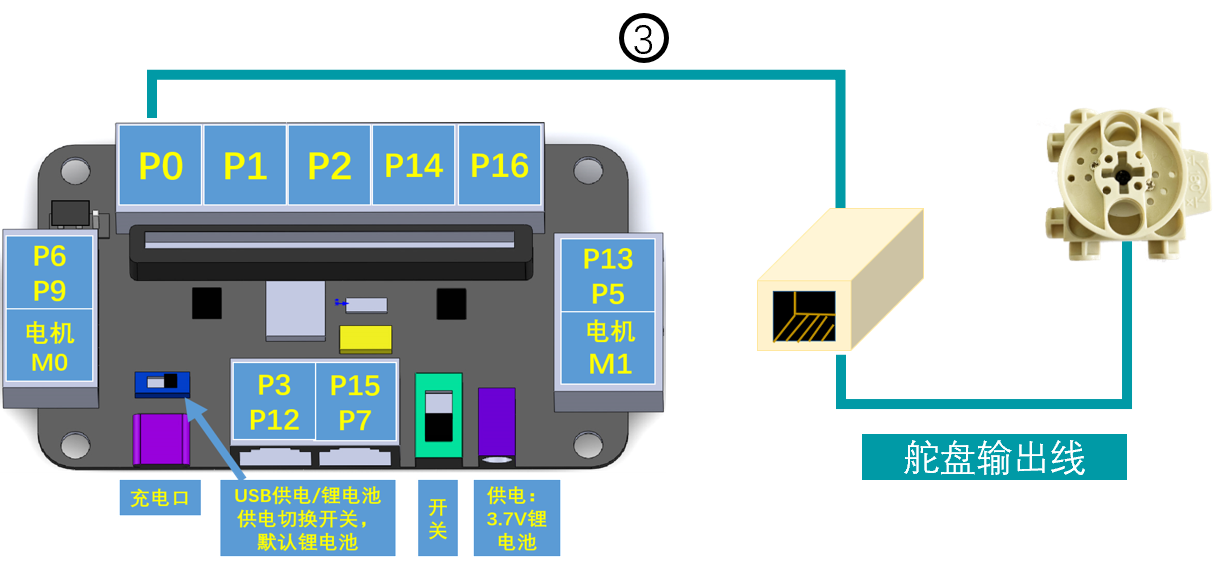
扩展板(V1.0)连接方式
伺服电机可以连接的扩展板接口有 P0,P1,P6,P13,P3,通过转接线可以连接的端口有P9,P5,P12,P7,下图示例连接P0端口
接线类型

① USB Type-C数据线
.png)
②PH2.0-4P转RJ12线

③6P6C-RJ12线
程序代码(主板/扩展板)
from npython import *
servos.write_angle(0,50)#控制P0号端口舵机转动50度
time.sleep(2)#延时2秒
servos.write_angle(0,100)#控制P0号端口舵机转动50度
time.sleep(2)#延时2秒
程序说明
按照上图硬件连接,默认将舵机接在P0端口,运行程序,可观察舵机舵盘先转动到50度,2秒后在转动到100度。
运行效果
运行程序,观察舵机舵盘的运动情况。