超声波传感器
大约 3 分钟约 755 字
超声波传感器
传感器介绍
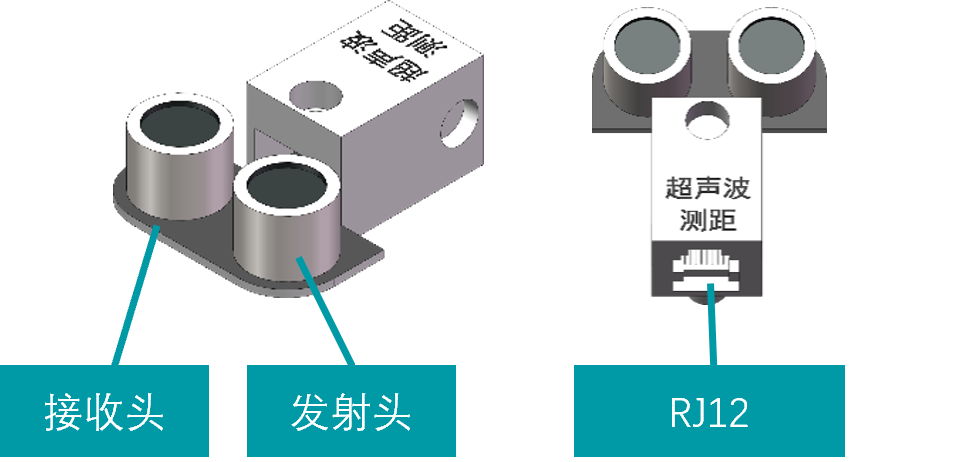
超声波传感器是一种用于测量距离的设备,它通过发射超声波并接收遇到障碍物后反射回来的超声波来工作。具体来说,传感器首先发出超声波信号,当这些波碰到障碍物时会反射回来,并被传感器中的接收器捕捉。根据发射和接收之间的时间差,结合声波在介质(通常是空气)中的传播速度,计算出障碍物的距离。这种方式使得超声波传感器能够在多种应用中精确测量距离,如自动门、机器人避障及液位测量等。
 |
| 工作电压 | 5V |
|---|---|
| 类型 | 传感器 |
| 接口类型 | RJ12 |
| 外观尺寸 | 42*25*52mm |
| 适配类型 | 主板/扩展板 |
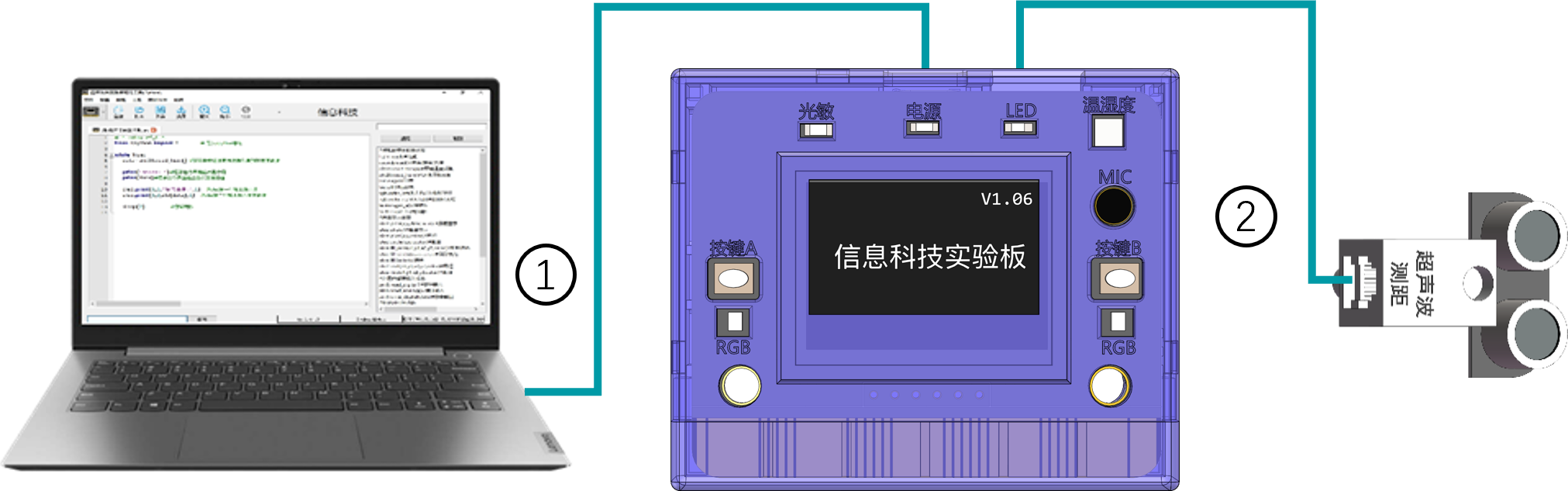
主板连接方式
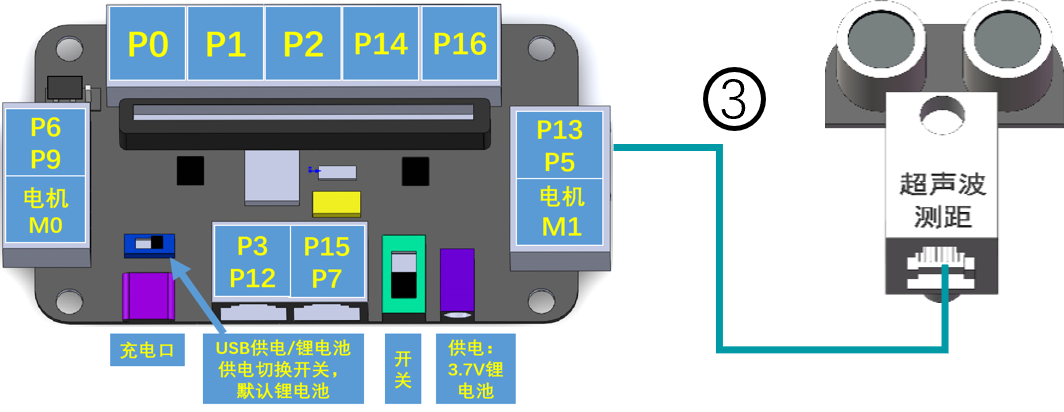
扩展板(V1.0)连接方式
超声波传感器可以连接的扩展板接口有P13/P5,P6/P9,P3/P12,下图为P13/P5端口连接图
接线类型

① USB Type-C数据线
.png)
②PH2.0-4P转RJ12线

③6P6C-RJ12线
程序代码(主板)
from npython import *
csb=CS_ult()#实类化传感器
csb.init(trig_pin=PINS[0],echo_pin=PINS[1])#初始化
while True:
#获取超声波传感器(外置)的距离值并显示
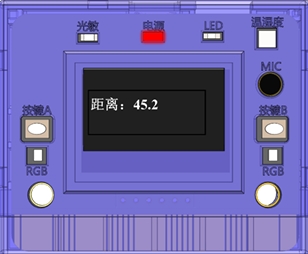
oled.print(1,2,"距离:"+str(csb.read()),1)
time.sleep(0.5) #延时0.5秒
程序代码(扩展板)
from npython import *
csb=CS_ult()#实类化传感器
csb.init(trig_pin=PINS[13],echo_pin=PINS[5])#初始化
#注:端口引脚初始化顺序以拓展板上顺序标注依次填入
while True:
oled.print(0,1,"距离:"+str(csb.read()),0) #屏幕显示
time.sleep(0.5)#延时0.5秒
程序说明
超声波传感器(外置)接实验板通用接口。csb.init()为超声波传感器初始化引脚函数,其中trig_pin用于指明超声波传感器的trig触发脚,echo_pin用于指明超声波传感器的echo回响脚。csb.read()为超声波传感器读取障碍物距离函数,返回值为浮点数,范围为0~550,若返回为-1表示出错或无障碍。
运行效果