碰撞传感器
大约 2 分钟约 617 字
碰撞传感器
传感器介绍
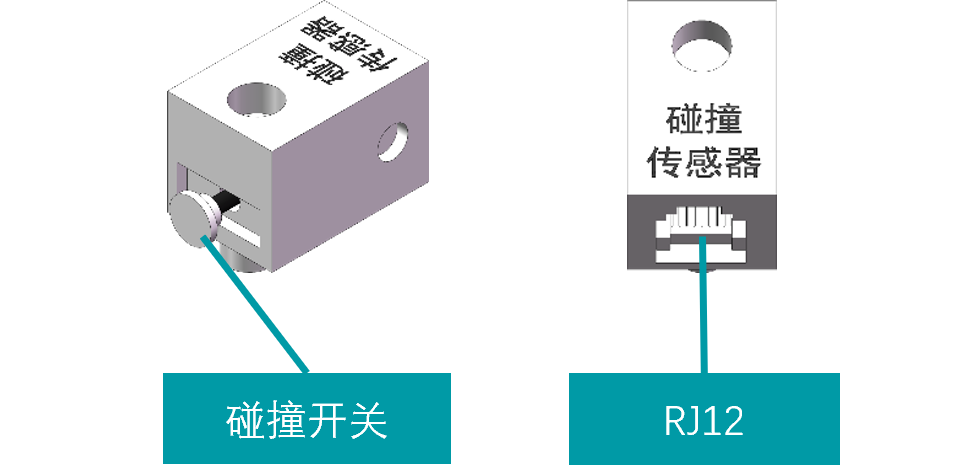
碰撞传感器通过检测碰撞开关的信号来判断传感器或其安装部件是否与其他物体发生接触。该传感器配备了高灵敏度且防抖动的开关,确保机器人能够可靠地获取碰撞信息。通常情况下,当没有发生碰撞时,碰撞传感器返回0;而一旦检测到碰撞,传感器则返回1。这种设计使得碰撞传感器在机器人导航、避障系统以及自动化设备中具有很高的可靠性,能够有效地帮助设备感知周围环境并做出相应反应。
 |
| 工作电压 | 5V |
|---|---|
| 类型 | 传感器 |
| 接口类型 | RJ12 |
| 外观尺寸 | 20*25*35mm |
| 适配类型 | 主板/扩展板 |
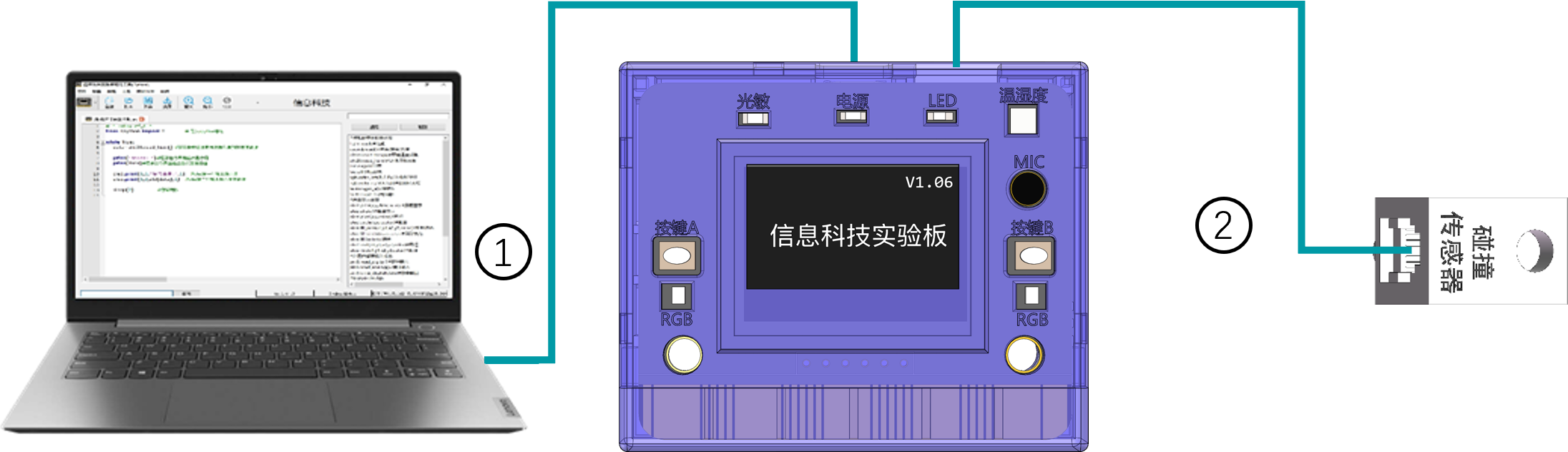
主板连接方式
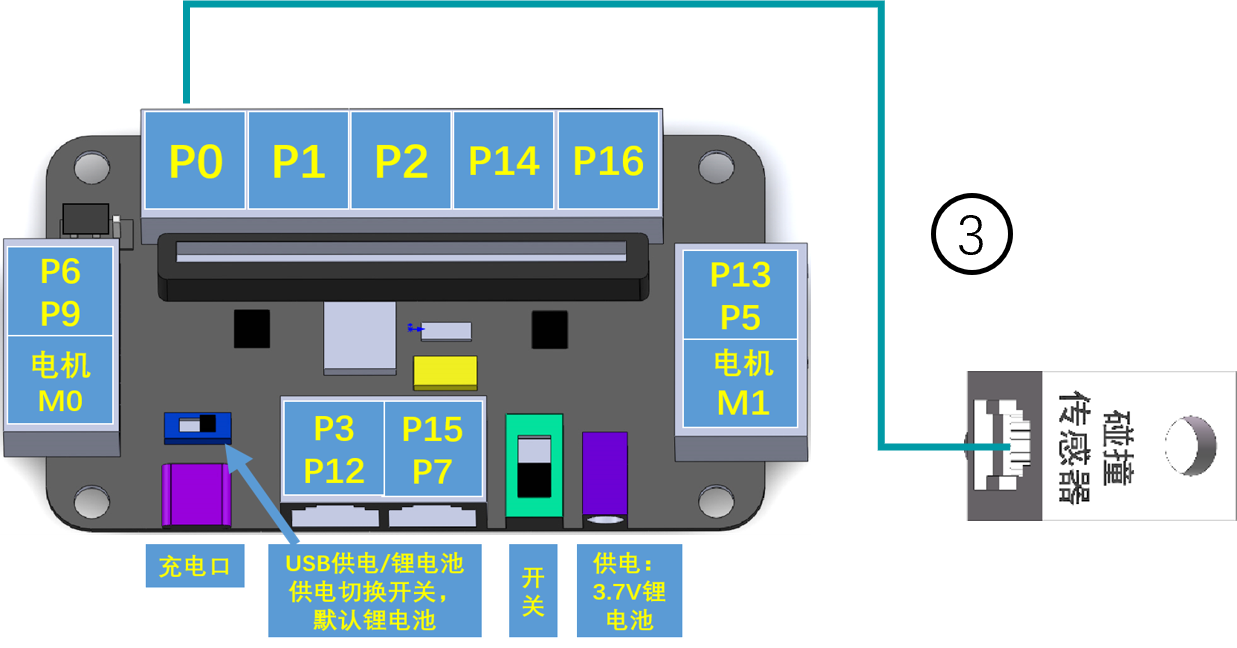
扩展板(V1.0)连接方式
传感器可以连接的扩展板接口有 P0,P1,P6,P13,P3,通过转接线可以连接的端口有P9,P5,P12,P7,下图为P0端口连接图
接线类型

① USB Type-C数据线
.png)
②PH2.0-4P转RJ12线

③6P6C-RJ12线
程序代码(主板/扩展板)
from npython import *
while True:
#获取P0口的碰撞传感器(外置)的返回值并显示
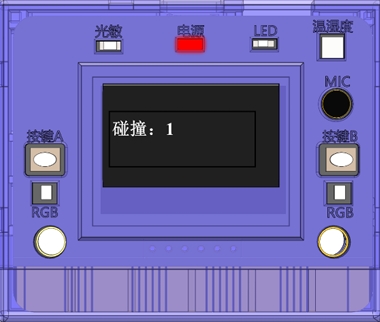
oled.print(1,2,"碰撞:"+str(pin0.read_digital()),1)
time.sleep(0.5) #延时0.5秒
程序说明
传感器接实验板通用接口。获取其变化值并在实验板屏幕上显示。pin0.read_digital()为端口读取函数。可以获取其变化的数字值,返回0或1。
运行效果