L型减速电机
大约 2 分钟约 607 字
L型减速电机
传感器介绍
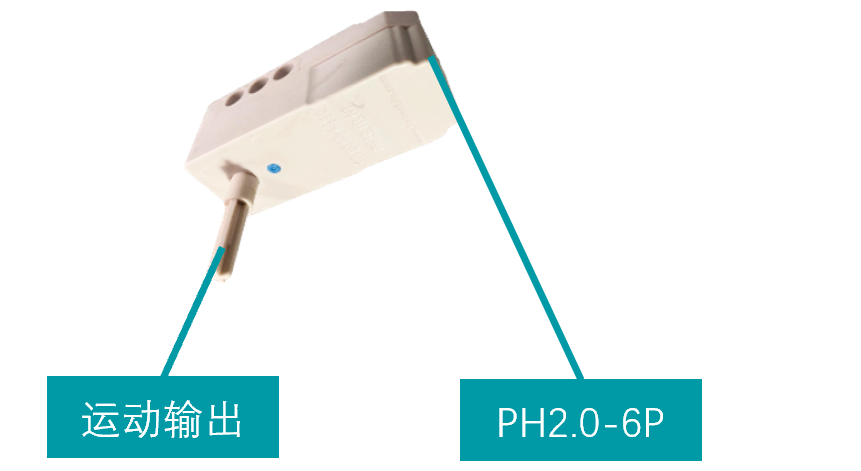
“L”型减速电机主要由直流电机、齿轮箱、输出轴及编码盘(编码电机带有) 组成,由机器人主机控制其正反、快慢运转,经由齿轮箱减速(主要作用是改 变输出速度及扭矩)后由输出轴输出动力带动轮子、齿轮、凸轮等外部结构转 动。L”型减速电机需要电机驱线路,必须有扩展板(使用方法详见附录三)支持才能使用。
 |
| 工作电压 | 5V |
|---|---|
| 类型 | 执行器 |
| 接口类型 | PH2.0-6P |
| 外观尺寸 | 78*30*30mm(不含输出轴) |
| 适配类型 | 主板/扩展板 |
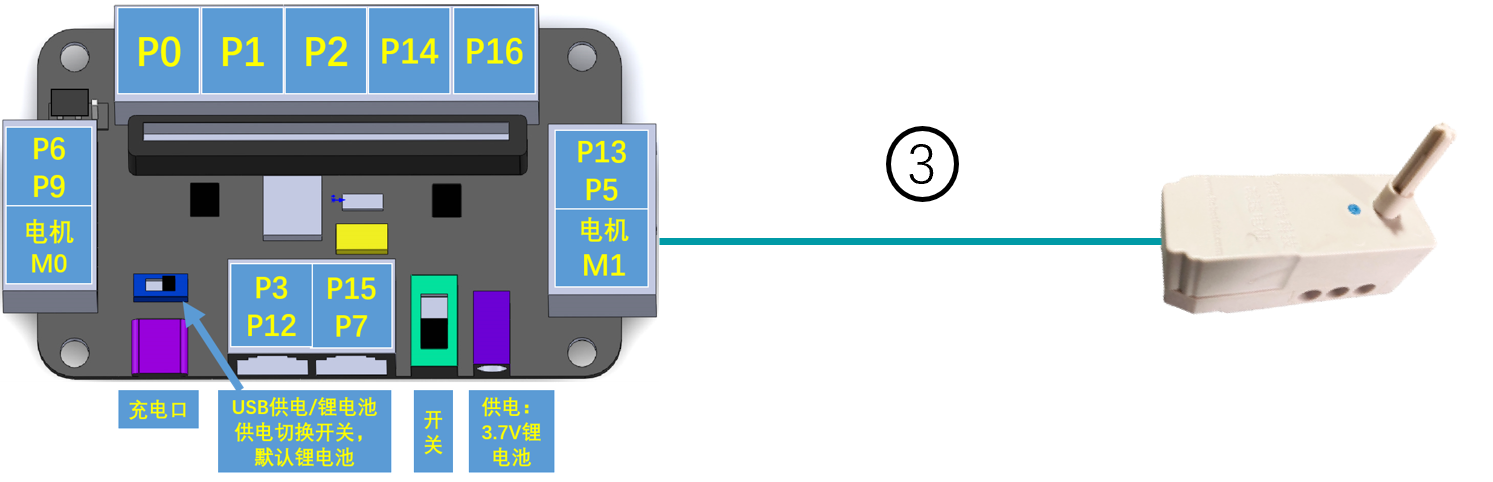
扩展板(V1.0)连接方式
“L”型减速电机只能连接电机M1或电机M2接口,下图示例连接电机M1端口
接线类型

③PH2.0-6P转RJ12线
程序代码(主板/扩展板)
from npython import *
from RUNNINGLIB import * #导入电机库
#电机接电机M1口
#电机转3秒停止
motor(1,60)#1号电机以60速度转动
time.sleep(3) #延时3秒
motor(1,0)# 1号电机停止
程序说明
电机接扩展板电机M1口。实验板中需要下载相应的电机驱动库文 件RUNNINGLIB.py,放置于实验板根目录下。 motor(port,speed)为电机控制函数,参数port为电机端口号,值为 0或1,参数speed为电机的速度,值为-100~100,当值为0时表 示停止,接近0的速度可能电机不会软件,速度为负值时为反方向。 运行效果
运行效果
L”型减速电机以60速度转动3秒后停止。