视觉模块
大约 4 分钟约 1123 字
视觉模块
算法介绍
| 算法id | 名称 | 简介 |
|---|---|---|
| 1 | 颜色识别 | 设置1~25个识别区域,返回每个区域中的颜色信息,如R,G,B值及分类标签 |
| 2 | 色块检测 | 检测图像中是否包含一个或多个指定颜色的色块,返回其坐标和尺寸,可以通过设置色块尺寸用于滤除干扰 |
| 3 | 标签识别 | 检测图像中是否有Apriltag图案,目前支持16H5,25H9,36H11编码,可以同时识别多个图案 |
| 4 | 线条检测 | 检测图像中的实心线条,返回线段的两个端点坐标及倾斜角度,曲线将被近似为直线段处理,可支持5个线段检测 |
| 5 | 深度学习 | 对任意物体进行离线训练并进行识别 |
| 6 | 卡片识别 | 识别特制的卡片图案,10张交通卡片,9张形状卡片,10张数字卡片 |
| 7 | 人脸识别 | 检测与识别人脸,可以通过短按导航键来记录人脸数据,已记录的人脸将会分配一个Label标签用于分类 |
| 8 | 20类物体 | 实现对20类常见物体的识别,诸如猫、椅子、人、汽车、电视等 |
| 9 | 二维码 | 识别简单的二维码,可自定义生成,但应符合以下条件:由基本ASCII码字符组成,不超过25个字符,白底黑格图案 |
| 10 | 运动物体 | 判断图像中是否有移动区域,如果有,返回该区域的坐标和大小,传感器需处于静止状态,自身不可移动 |
颜色识别
设置1~25个识别区域,返回每个区域中的颜色信息,如R,G,B值及分类标签。
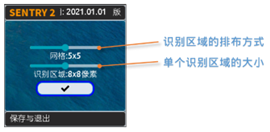
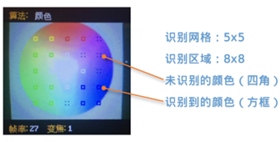
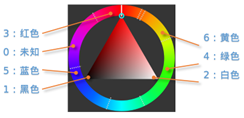
通过摇杆进行算法配置 运行界面 返回分类标签
色块检测-Blob
检测图像中是否包含一个或多个指定颜色的色块,返回其坐标和尺寸,可以通过设置色块尺寸用于滤除干扰。 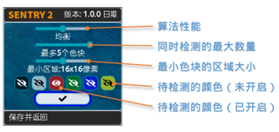
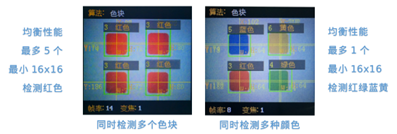
通过摇杆进行算法配置 运行算法,返回分类标签
标签识别-Apriltag
检测图像中是否有Apriltag图案,目前支持16H5,25H9,36H11编码,可以同时识别多个图案。
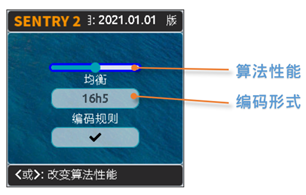

通过摇杆进行算法配置 运行界面

三种Apriltag码标签
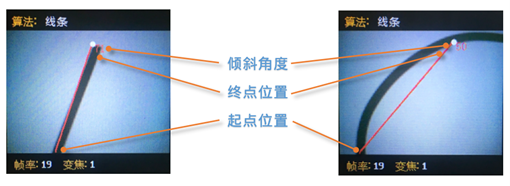
线条检测-Line

通过摇杆进行算法配置 运行界面
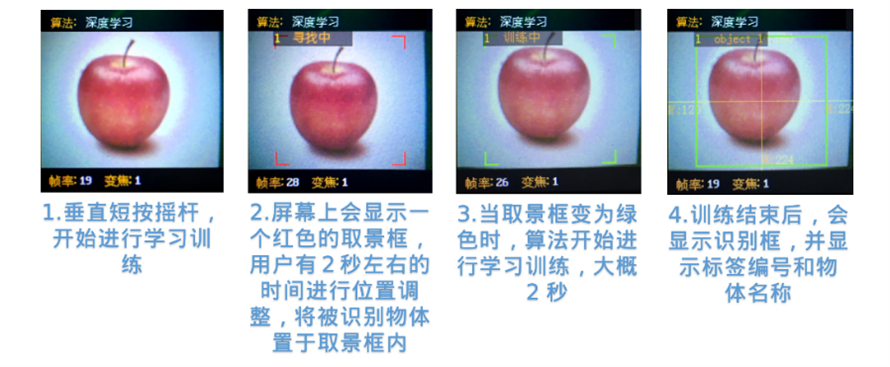
深度学习-Learning
对任意物体进行简易离线训练并进行识别。
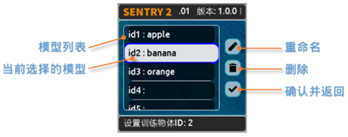
通过摇杆进行算法配置
卡片识别
识别特制的卡片图案,10张交通卡片,9张形状卡片,10张数字卡片。
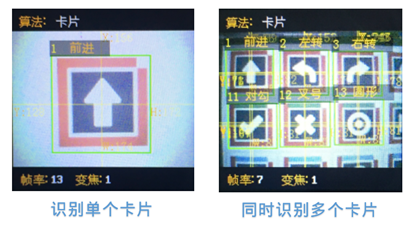

可以识别的卡片
人脸识别

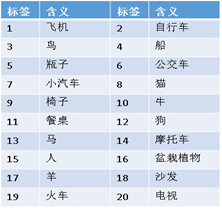
20类物体识别
实现对20类常见物体的识别,诸如猫、椅子、人、汽车、电视等。

二维码识别-QRCode
识别简单的二维码,可自定义生成,但应符合以下条件:由基本ASCII码字符组成,不超过25个字符,白底黑格图案。 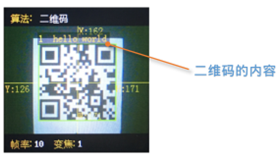

运动物体检测-Motion
判断图像中是否有移动区域,如果有,返回该区域的坐标和大小,传感器需处于静止状态,自身不可移动。 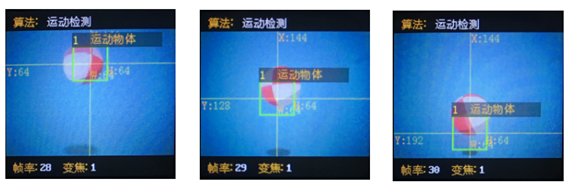
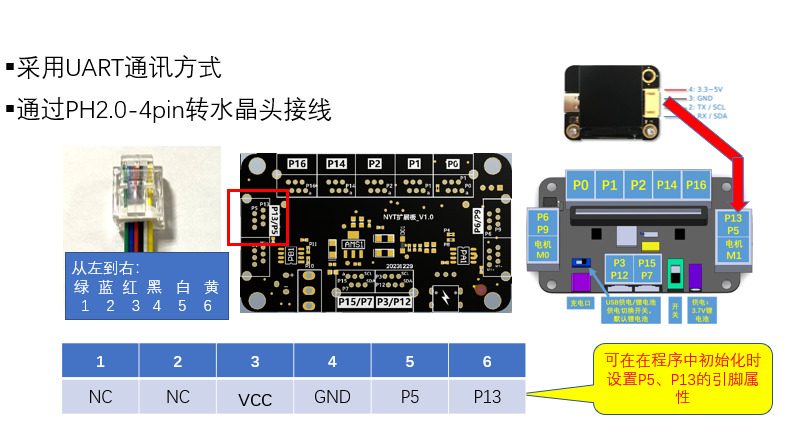
操作说明

样例代码
# -*- coding: utf_8 -*-
#导入MYBIT程序库
from npython import * # 导入npython模块
#在下面开始写你自己的代码
data=0
uart1=UART(1,baudrate=115200,rx=PINS[13],tx=PINS[5],timeout=10)
time.sleep(4)
uart1.write("o1")#开启算法识别
time.sleep(0.5)
while True:
uart1.write("L")
time.sleep(0.1)
if uart1.any():
data=uart1.read()
data=data.decode('utf-8')#解码
print(data[0])
if data=='1\n':
rgb.write_left(255,0,0)
else:
rgb.write_left(0,0,0)
oled.print(1,1,"数值="+str(data),1)
print("数值="+str(data))